
Automated Vehicle Control Systems
Contributed by Bret Foreman, U.C. Berkeley
 Automated control of passenger vehicles is one promising method of increasing traffic density and efficiency on existing highways. Most schemes will require extensive use of wireless communication for coordination of maneuvers, stable control, safety, traffic advisories, navigation, and fault control. This requires enhancements of
existing wireless technologies for control (short range communication between pairs of closely spaced vehicles), maneuver (communication among groups of vehicles), and advisory (communication between vehicles and a central, stationary database) functions. The California Partners for Advanced Transit and Highways (PATH) program investigates such systems. This program envisions closely spaced, train-like groups of one to twenty automated vehicles in special lanes separated from non-automated vehicles by barriers. Gaps between vehicles within a group would be less than two meters, bumper-to-bumper. Gaps between groups in the same lane would be over 50 meters. In this context, the control function is to maintain stability and good ride quality among the vehicles in a group; the maneuver function is for a vehicle to join or leave a group; and the advisory function is to inform the groups about conditions ahead.
This application
and the car-to-car propagation channel pose
particular requirements to the AVCS communication system.
Automated control of passenger vehicles is one promising method of increasing traffic density and efficiency on existing highways. Most schemes will require extensive use of wireless communication for coordination of maneuvers, stable control, safety, traffic advisories, navigation, and fault control. This requires enhancements of
existing wireless technologies for control (short range communication between pairs of closely spaced vehicles), maneuver (communication among groups of vehicles), and advisory (communication between vehicles and a central, stationary database) functions. The California Partners for Advanced Transit and Highways (PATH) program investigates such systems. This program envisions closely spaced, train-like groups of one to twenty automated vehicles in special lanes separated from non-automated vehicles by barriers. Gaps between vehicles within a group would be less than two meters, bumper-to-bumper. Gaps between groups in the same lane would be over 50 meters. In this context, the control function is to maintain stability and good ride quality among the vehicles in a group; the maneuver function is for a vehicle to join or leave a group; and the advisory function is to inform the groups about conditions ahead.
This application
and the car-to-car propagation channel pose
particular requirements to the AVCS communication system.
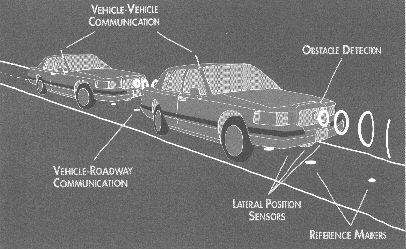
Figure: Autonomous vehicle control requires reliable wireless
communication links.
Source: California PATH
Social Motivations
New urban freeways systems cost hundreds of millions of dollars per mile. The high cost of infrastructure suggests that incremental improvements in system performance can justify the cost of vehicle modifications. Here's a simple example:
California can build a new urban freeway of 10 miles long at a typical cost of 1 billion dollars.
The roadway is 4 lanes each way so about 16000 vehicles per hour may use it (2000 vehicles per hour per lane). This is peak usage so we may assume a daily usage of half this rate or 8000 vehicles per hour or a total of 192,000 vehicles per day. The question then is how many distinct vehicles does this roadway serve?
Now we note two obvious facts. First, vehicles almost always make round trips. That means that, at most, this system can serve 96,000 vehicles per day. Second, if a vehicle is not using this piece of roadway then it must be using some other piece (or sitting idle). That means that this roadway can be taken to serve the same 96,000 vehicles every day without loss of generality. A simple division shows that this roadway costs over $10,400 per vehicle! Admittedly, this huge cost is amortized over the lifetime of the roadway (perhaps 20 years) but that still adds more than $500 per year to the cost of operating each vehicle.
Clearly, it makes sense to add electronics to the roadways and the vehicles to avoid building new roadways, even if those electronics add thousands of dollars to the cost of each vehicle. As a final motivation, consider the environmental and esthetic costs of new roadways versus the optimization of existing ones. All these factors taken together can justify substantial investment in a host of technologies to increase the efficiency of the existing roadway system.
Some Solutions
The PATH project at UC Berkeley is looking at a variety of applications of high technology to the problems of over crowded roadways systems. One of those applications is in so called AVCS or Automated Vehicle Control Systems. In PATH, this is envisioned to be an automated lane (or set of lanes) with all vehicles controlled by computers. The automated vehicles would follow each other in closely spaced "platoons" of two to twenty vehicles.

It is envisioned that such a system could make use of much of the existing roadway infrastructure. Automated lanes would be segregated from manual lanes by barriers but those barriers could be retrofitted onto existing roadways at reasonable cost. Entry/exit presents a more difficult but still tractable problem.
Some Technical Details
In keeping with modern design methodologies for large scale systems, each vehicle is required to operate
autonomously but cooperatively. This helps such a system of vehicles to be robust and fault tolerant. A protocol has been designed that allows vehicles to coordinate their movements when joining, traveling in, and leaving a platoon. In addition, control laws have been developed to provide a stable, comfortable ride for passengers. It is assumed that vehicles will exchange information with some centralized source regarding route planning, road conditions, capacity allocation, etc. All of these activities require a capacity for wireless communication among vehicles in a platoon, among platoons, and between vehicles and some central database.
Technical Motivations
As can be seen from the discussion above, the wireless communications needs for AVCS are quite broad. We've divided them into three categories
Communications for Control
The first category is communication required for vehicle control within a platoon. A design goal is to allow vehicles to follow each other in a platoon with less than two meter spacing. In addition, studies have shown that abrupt changes in acceleration (called jerk) are very uncomfortable for passengers. In order to achieve these design goals the control laws for the vehicles require communication among the vehicles in a platoon. Both simulation and experiment have shown that the required communication date rate is quite high by the standards of conventional telemetry. A desirable number from a control perspective is an update rate of 50 Hz. This implies that there may be 50 transactions per second per vehicle within a platoon. Platoons are expected to grow to a maximum of 20 vehicles. That would produce 1000 communication transactions per second in a platoon. If a typical transaction consisted of a packet of 100 bits then the raw data rate within a platoon is 100,000 bits/second. In practice, 1000 packets per second is very difficult to achieve in most communication channels due to interrupt latency, synchronization overhead, and other delays associated with
the computer operating system.
One useful characteristic of control-communication is that it is quite structured in both space and time. Each vehicle communicates only with it's nearest longitudinal neighbors and/or the lead car in the platoon. Also, the order of communication is fixed by the control protocol, with packets flowing from lead vehicle to rear vehicle. This suggests some kind of line-of-sight system. An inconvenient property of control-communication is that it should neither be excessively delayed nor should packets be lost. The chance of packet loss and the chance of delay are inversely related in most communication systems. Improving one degrades the other.
Communications for Maneuvers
The second category is communication required for maneuvers into and out of platoons. This case is much less structured than the control case since all packets are more-or-less random in time, source, and destination. Two desirable properties in this case are that the channel activity is very low (about 1 small packet per second) and delivery and delay are not critical. In particular, the maneuver protocols have been designed such that lost or delayed packets will only abort the maneuver, not cause a loss of stability. Due to the unstructured nature of this situation, line-of-sight communication is not possible. In fact, it will be necessary that two vehicles be able to communicate even with a third directly between.
Advisory and Navigation Information
The third category is communication with a central database for traffic advisories, route planning, road conditions, etc. This might also include information to aid in vehicle navigation. The requirements for this case are not yet well specified. At a minimum they will be the same as for the maneuver case. It's possible that the bandwidth requirements could be much higher, as in the case where map information is being downloaded. A desirable feature of the advisory case is that it's very non-critical and will be unaffected by a high rate of packet loss or long delays. This case suffers from the same undesirable features as the maneuver case above but also has the further properties that the required communication distances will be much longer (at least 1 Km)




